
一、项目概述
本方案旨在定制一套机器人教育实践平台系统,以满足某高校实验室在机器视觉和力控方面的教学需求。系统将围绕AUBO-i5协作机器人、海康工业相机、3D相机及六维力传感器进行开发,实现机器人控制、视觉检测、力控装配等功能,并提供开源的上位机软件供后期功能扩展。
二、系统硬件组成
1、机器人:采用AUBO-i5协作机器人,具备高精度、高安全性等特点,适用于教学场景。
2
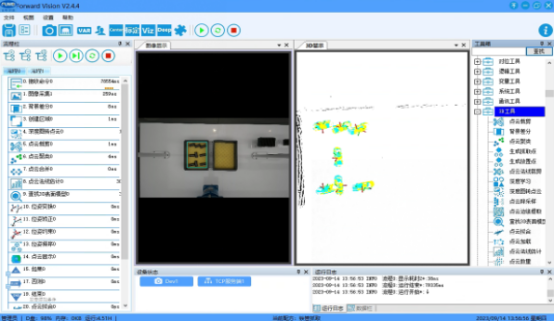
2、相机:包含海康工业相机和3D相机,用于获取工件的图像信息,支持传统图像处理和深度学习图像检测。
3、六维力传感器:选用坤维(KWR75)或其他品牌,用于实时监测机器人末端执行机构与工件之间的力交互信息。
三、上位机软件设计
1、基础功能:
机器人控制:实现机器人的连接、断开、关节或姿态控制等功能。
相机控制:实现相机的连接、断开、图像采集等功能。
状态显示:实时显示机器人的关节和位姿状态、六维力传感器的状态参数以及相机拍摄的图像。
2、专属功能:
轴孔装配:通过上位机操作,结合视觉检测和力控技术,实现轴孔的自动装配功能。
界面设计:上位机界面应简洁明了,易于操作。界面应包含基础功能按钮和状态显示区域,同时提供轴孔装配功能的入口。
四、功能实现
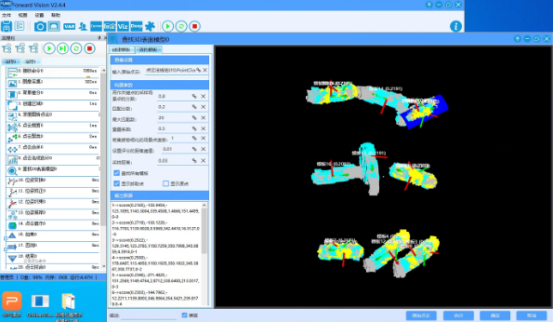
1、机器视觉:
传统图像检测:利用模板匹配、圆拟合、边拟合等方法实现工件的定位和识别,支持条码、二维码、字符数字的识别,以及灰度面积、板块数量的计算。
深度学习图像检测:通过深度学习算法实现工件的自动识别和定位。尽管目前深度学习仍需要手动标注图像,但我们将致力于提高训练效率和识别精度,逐步减少标注工作量。
2、力控装配:
结合六维力传感器的数据,实现机器人末端执行机构与工件之间的力交互控制,完成轴孔的精确装配。
五、项目风险及应对措施
六维力传感器配合风险:由于尚未配合过六维力传感器,可能存在一定的技术难度和不确定性。我们将安排专业的技术团队进行攻关,确保传感器的顺利集成和稳定工作。
深度学习图像检测风险:深度学习图像检测需要达到一定的识别精度和效率,同时满足一键训练的需求。我们将持续优化深度学习算法,提高识别精度和效率,同时探索一键训练的实现方式。
六、后期扩展与场景切换
上位机软件采用开源设计,便于后期教学中根据需要进行功能扩展和场景切换。例如,可以将轴孔装配场景切换为精细齿轮的啮合或其他工件的识别与抓取等任务。通过修改和调试开源程序,可以轻松实现不同场景下的机器人操作与视觉检测功能。
本方案通过整合机器人、相机、六维力传感器等硬件资源,结合开源的上位机软件设计,为机器人教育实践平台提供了一个功能丰富、易于扩展的教学环境。通过实践平台的使用,学生可以深入了解机器视觉和力控技术的原理与应用,提高实际操作能力和创新能力。
-开元棋下载app渝ICP备16002653号-1  渝公网安备 50010902001034号 网站建设:九度互联
渝公网安备 50010902001034号 网站建设:九度互联
AI鸟类监测 重庆兴趣培训 重庆蔬菜配送 四川党史教育
