
北美时间2023年5月22日至25日,Flexiv非夕参展北美最大的自动化展会之一AUTOMATE(美国底特律自动化展)。
在本次展会上,非夕带来了七轴自适应机器人Rizon拂晓全系列(Rizon 4、Rizon 4s、Rizon 10)、力控夹爪Grav星擎系列(Grav、Grav Enhanced)、和十项最新的行业应用,展现了先进的自适应机器人技术、强大的方案能力和成熟的项目经验。
自适应机器人汽车仪表板总成装配✦
在该汽车仪表板总成装配站中,Rizon 4和Rizon 10紧密协作,模拟人工双手作业,同时操控多个不同零件。组装工件时,一只手臂夹住工件,另一只手臂对其进行姿态调整,从而保证了高效的精密装配。
基于强大的力控能力,自适应机器人拂晓系列可以提供多个方向的柔顺度和刚度,并采用力控搜孔策略模拟人手进行柔性置入。高级的控制和自主避障策略同时能确保双臂作业的安全稳定,更适合复杂的任务和多样的产线环境。

· 高度仿人化:自适应机器人可以实现高刚度和柔顺控制,模拟人手进行差异化的置入动作。
·高适应性:适应来料位置、方向、姿态的不确定性。
·高成功率:当出现位置偏差或插入失败时,自适应机器人可以基于力控进行位置纠偏,提高节拍。
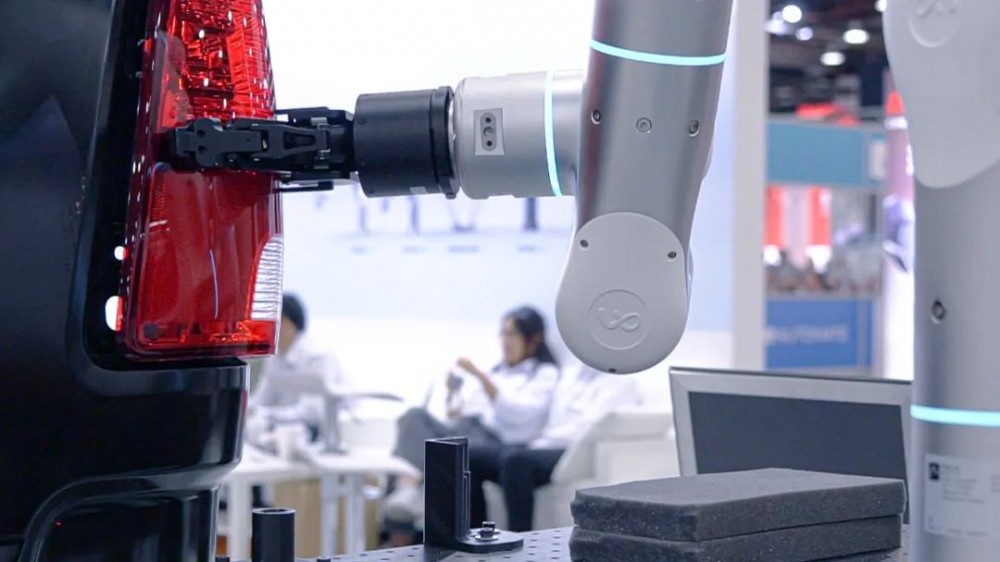
自适应机器人汽车尾灯装配✦

该装配工作站演示采用自适应机器人结合非夕自研自产的星擎系列夹爪Grav Enhanced,从而让观众能够更清楚地了解其双重作业模式:
1)指尖抓取模式,用于小物体的捏合操作;
2)壁虎材料抓取模式,利用壁虎材料吸附并抓取有曲率的大型工件。
在实际作业中,Grav Enhanced使用指尖抓取小灯泡,通过力控搜孔策略将其与插入槽对齐,并扭转锁定至固定位置,完成安装。随后,夹爪切换到壁虎材料模式,牢牢抓取大尺寸、高曲率的尾灯并将其插入车身面板中。
·通用抓取:Grav Enhanced的壁虎抓取模式具有超强摩擦力,能够在施加最小挤压力的情况下,实现多角度吸附及抓取大型曲面工件。
·双模式自由切换:在复杂任务中,指尖的刚性抓取用于精确操控小物体,壁虎模式的柔性抓取用于处理异形、过重的大物体。
·简单灵活:Grav Enhanced的壁虎材料可以实现无源吸附,无需额外电源或真空泵,是集成AGV或柔性产线的理想选择。
·便捷使用:Grav系列夹爪完美适配自适应机器人,可以做到即插即用。
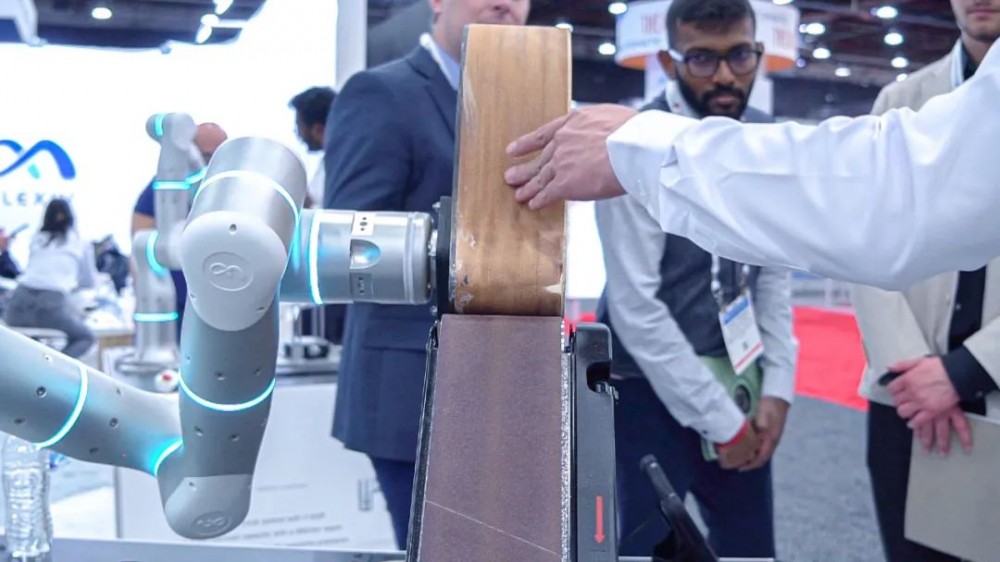
自适应机器人吉他抛光✦

非夕的吉他抛光解决方案利用自适应机器人Rizon拂晓兼容外部TCP的力控特性,能够稳定地举起吉他贴近独立抛光/打磨机并贴合转动,进行其表面抛光作业。
Rizon 4s具备先进的复合力位控制能力,可以确保机器人对工件的复杂曲面施加恒力。该解决方案无需额外的传感器、或具有力控或浮动功能的打磨设备,因此具有很高的成本效益。
·兼容外部TCP:可配合大型打磨/抛光机使用,部署更灵活。
·低成本:无需额外的力传感器或浮动磨头,换型换先效率高。
·高质量成果:优越的复合力位控制能力保证出色的抛光一致性,满足客户需求。
自适应机器人摩托车发动机装配✦
该摩托车发动机装配应用展示了自适应机器人如何运用精细化力控,来完成齿轮装配和涂胶的连续任务。其中,力控搜孔策略确保工件被柔性置入到相应位置,实时的力控贴合使粘合剂可以被精确地涂抹在垫圈边缘。
作业过程中,机器人会根据任务自动更换末端工具,从而提高工作效率、降低综合成本。

·优越力控:自适应机器人具备先进的力传感和控制策略,有效容忍位置误差,避免工件磨损,保证装配质量。
·兼容通用:基于强大的AI算法,机器人可以自主迁移相应知识到类似的任务中,从而实现便捷部署、高效换型换线。
·快速更换:Rizon独有的力控能力使其可以直接按需更换末端工具,提升节拍。
自适应机器人汽车车身抛光✦
自适应机器人汽车车身抛光工作站以安装在线性导轨上的Rizon 4s为主体,具备八个作业自由度,大大扩展了机器人的应用范围。凭借出色的复合力位控制技术,Rizon 4s可以顺应并实时贴合复杂曲面,实现高一致性的抛光效果。

·高柔性:在产线环境中,该方案可以有效容忍来料表面差异和工件对位时产生的位置误差,并有效抵抗外部振动和干扰。
·便于部署:搭配图形化编程系统Flexiv Elements,工程师通过简单的拖拽示教即可记录抛光轨迹,能实现快速部署。
·高一致性:在任何生产环境中,该方案前沿的力位复合控制技术都能保证产品的抛光成果一致性。
·通用可扩展:该方案适用于多种复杂曲面和行业,如汽车、航空航天、海洋工业、家具制造中的表面打磨、抛光、去毛刺、塑型等。
自适应机器人螺丝拧紧(多面体工件)✦
基于自适应机器人的高响应力控特性,非夕的螺丝拧紧解决方案可以采用力控搜孔、力控下压、入牙导正等一系列力控策略弥补视觉或非标机构的误差,实现高精度拧紧。该方案简洁,调试、换型周期短,可兼容不同类型或形状的产品,实现多规格、多角度拧紧,具备较高的生产柔性。
·实时力控监测:自适应机器人具备高精度力觉分辨率,通过监测插入力和扭矩实时监测安装状态,灵敏度最高可达到0.03N。
·高度误差容忍:通过力控策略自适应弥补工件位置及姿态误差,降低NG率。
·多场景通用:搭配不同工具,可满足多规格、多角度(垂直、侧向等)的拧紧需求。
·快速部署:方案非标率低,搭配自适应机器人专用软件包,调试周期较传统方案低20%以上。
自适应机器人汽车玻璃底涂✦
基于自适应机器人的高精力觉感知和高响应能力,非夕的汽车底涂解决方案在满足底涂剂均匀、稳定和高精度涂抹的同时,具备极佳的柔性和自适应能力,无需视觉及点位示教,通过拖拽示教生成轨迹。可实现自主恒力贴合,适应各种形状物体,对产品位置、尺寸误差具有较高的容忍度,便于快速部署和产品切换。

·高误差容忍:基于精细的力位复合控制,自主施加恒力贴合曲面,实现对工件复杂曲率及位置误差的高容忍度。
·高成果一致性:底涂轨迹连续完整,轨迹宽幅、中心线位置误差均符合要求,良率可达99%以上。
·部署便捷:通过拖拽示教直接生成轨迹,操作简单、效率高,人机交互系统友好。
·通用可扩展:自适应不同形状和尺寸的工件,产品换型换线效率高,综合成本低,可延展至其他相似工艺。
自适应机器人服务器测试✦
非夕的服务器测试应用方案采用自适应机器人结合夹爪Grav星擎,无需视觉辅助,即可通过多种线束与接口的插拔来完成通信类场景的测试任务。基于机器人先进的力控搜孔策略和Grav夹爪的力控能力,该方案可以有效容忍来料误差、位置误差,并兼容多类型工件,高效柔性地完成测试。

·高柔性:采用非夕自研的力控搜孔策略,能够柔性应对产线或移动场景中的来料误差和位置误差,防止工件损坏。
·强兼容性:可适配通信场景中多种类别的插头/接口,包括但不限于RJ45、USB、光模块、电源线等。
·成本低:无需视觉模块和额外专机设备,通用性强,可一台机器完成多种任务。
·强扩展性:未来可升级成为各领域通用的测试方案,并有效完成线束处理等复杂任务。
自适应机器人小球平衡✦

小球平衡演示将自适应机器人的高精度力分辨率和全身高速力响应可视化,让观众可以近距离、互动性地感受先进力控带来的优势。
根据力传感器数据,机器人末端能够实时判断小球的位置,从三个维度上控制托盘的平衡,使小球永远不掉落。搭配基于整机力控的实时规划算法,即使受到外界扰动,小球也能沿既定轨迹运行。

·强力控能力:Rizon 4s具备高达0.03N的力控分辨率,可以对最轻微的力变化做出反应,立即响应外部变化。
·优越抗干扰:自适应机器人能够快速适应各种振动、移动和其他干扰,在任何工作环境中保持最佳性能。
复合移动自适应机器人✦

由Flexiv和渠道伙伴Infinity Robotics联合打造的移动机械臂,展示了自适应机器人Rizon拂晓与AGV和AMR的强兼容性。Rizon支持标准的软硬件接口,更易于与外部设备集成和通信,从而可以轻松应对更广泛的场景。

·易于集成:Rizon具备通用的标准API接口,适用于多种不同的设备,易于部署和调试。
·稳定运行:标准的软硬件接口保证了低报错率和故障率。
在Automate现场,有许多观众和伙伴莅临非夕展台,参观自适应机器人技术和应用相关的演示,并通过与非夕专家们的深入交流,更加了解智能通用机器人正在为多个行业带来的影响与变革。
随着对北美市场的不断深耕,非夕帮助越来越多的终端客户完成以往很难被自动化的任务、解决综合成本难题,并在多个领域中创造了极具行业代表性的应用。同时,非夕积极携手美国、加拿大等地区的渠道、生态伙伴,通过资源互补与协作共赢,更好地服务于北美地区的广大用户。
美国底特律自动化展览会(AUTOMATE)
美国底特律自动化展览会AUTOMATE是由美国自动化行业协会(包含美国机器人行业协会、全球视觉协会和机动控制协会)主办的专业技术贸易展览会。此次AUTOMATE 2023在30万平方英尺的展览空间内提供了来自600多家领先参展商的制造自动化技术的最新创新,是迄今为止北美地区最大一次的展会。
-开元棋下载app渝ICP备16002653号-1  渝公网安备 50010902001034号 网站建设:九度互联
渝公网安备 50010902001034号 网站建设:九度互联
AI鸟类监测 重庆兴趣培训 重庆蔬菜配送 四川党史教育
